We are thrilled to welcome PickNik Robotics as our latest integration partner! The company recently incorporated RapidPlan into the MoveIt! open source motion planning framework. This allows users to seamlessly integrate our real-time motion planning technology into their existing robotic development process. This will make it easier to deploy our solution delivering reliable real-time planning and collision checking, a well-established constraint to the large-scale adoption of robotic systems.
PickNik Robotics is recognized for its world-class robotics expertise and open source frameworks for motion planning software. It provides a range of solutions including ROS integration, complex inverse kinematics, and motion planning. The plugin it has developed provides full planning and collision checking capabilities via a common motion planning interface and MoveIt! users will now be able to benefit from our innovative solution for collision-free motion planning: RapidPlan.
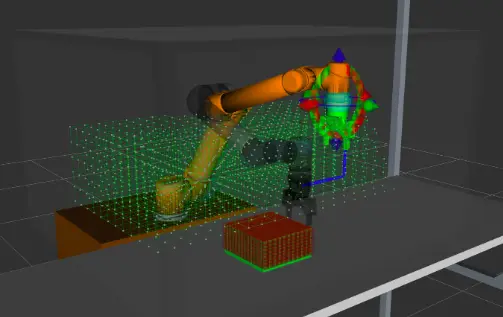
Our solution enables machines to navigate dynamic environments smoothly and quickly through high-frequency collision checking and planning using roadmaps. With the new MoveIt! plugin and the Realtime Robotics Motion Planning Accelerator (MPA) users will have access to vision sensor data like occupancy and point clouds and be able to compare this data with Robot motions to check for collisions in real-time. The MPA contains user-generated roadmaps which define all of the robot’s movements inside the workcell. RapidPlan comes with an easy-to-use software path planner for generating roadmaps, that together with the MPA enables a robot to plan up to 1000 different motions every second.
We are excited to collaborate with PickNik Robotics and look forward to continuing to work together on future innovations!