Insights
Transforming Industrial Automation with the Rapid Motion Planning, Pt 1
Why Rapid Motion Planning?
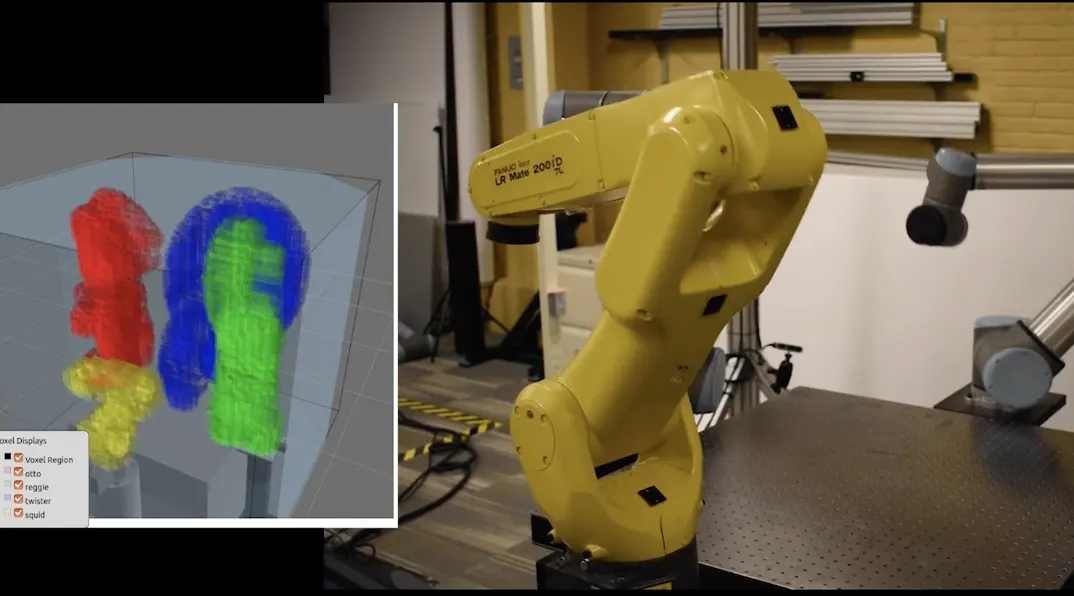
Realtime Robotics has developed the Realtime Controller that allows you to quickly deploy a multi-robot workcell that maximizes the collective performance of the robots. In the video on the left, you see four robots—three from Universal Robots and one from Fanuc—moving together in a demonstration workcell. All of the robots are moving quickly to perform simulated tasks, rarely slowing or stopping to avoid collisions with each other. The video makes this look deceptively easy, but this video shows a capability that is far beyond the state-of-the-art in industrial automation.
If you’ve ever had the pleasure of designing and deploying a multi-robot workcell, you know there have been two major pain points:
1. Workcell design has been slow and costly
It takes a lot of time and engineering effort to design a multi-robot workcell. There are many possible ways to position the robots. There are also many possible ways to assign tasks to robots and to order the tasks that are assigned to each robot. The combined possibilities for robot placement and task planning are vast, and manually searching for good solutions requires extensive engineering time and effort. Realtime has developed an automated tool that streamlines the process of finding optimized solutions, but that is the subject of another blog post; for now, assume the robots have been positioned and each robot has an ordered list of tasks to perform.
2. Robot motion planning has been slow and inefficient
All of the robot motions must be programmed to avoid collisions. Robot motion planning has been a longstanding bottleneck in robotics, and it is a painstaking process to determine every robot’s motion. To simplify the process, at the expense of performance, robot programmers frequently designate areas that can be reached by more than one robot as “interference zones”; by only permitting one robot in an interference zone at a time, collisions are avoided. This solution leaves significant performance on the table, because it is often the case that multiple robots could be in different parts of an interference zone at once, and the use of exclusive interference zones eliminates this productive activity.
The Realtime Controller solves the motion planning problem. With special-purpose hardware and a software toolkit, the Realtime Controller can perform hundreds to thousands of motion plans per second, which is orders of magnitude faster than the state-of-the-art. At that speed, it can quickly find optimized motion plans for every robot, guaranteeing there will be no collisions, without requiring interference zones. And, should the work cell change a bit—say, by moving a robot or changing the set of tasks to be performed—the Realtime Controller can quickly generate new motion plans without having to wait for weeks while engineers re-choreograph all of the motions. Robot programming is now just a simple matter of telling the robot where to end up; the Realtime Controller handles all of the complexity of figuring out how to get it there safely. Furthermore, the Realtime Controller can do this for all major robot OEMs.
What does this all mean for industrial automation? You can now deploy higher-performance work cells with your choice of robots in far less time!
Get in touch to learn more about how our rapid motion planning solution can help your operations.