Research
Solving the Autonomous Vehicles Motion Planning Conundrum
Our last blog explained the importance of motion planning for the adoption of AV. In this post, we’ll discuss how Realtime Robotics is enabling normal autonomous driving in urban environments.
Realtime Robotics has developed its own, special-purpose computer processor for AV motion planning to address the critical need for super-fast motion planning. This custom-designed processor is tailored to perform motion planning at rates of hundreds to thousands of times per second. The speed advantage of our processor, compared to commodity processors, derives from its sole focus on motion planning; all of its hardware resources and all of its power budget are devoted to motion planning. The concept of special-purpose processors is not new—graphics processors (GPUs) and bitcoin mining processors are two notable examples—but Realtime Robotics has created the first motion planning processor.
The tremendous speed of the Realtime Robotics motion planning processor enables ultra-fast reaction times and is, in fact, faster than needed simply to react. There is relatively little difference between reaction times of 5msec and 10msec (0.3 vs 0.6 feet traveled at 40mph). Nevertheless, the ability to plan faster than necessary to react enables an exciting new feature: risk-aware motion planning.
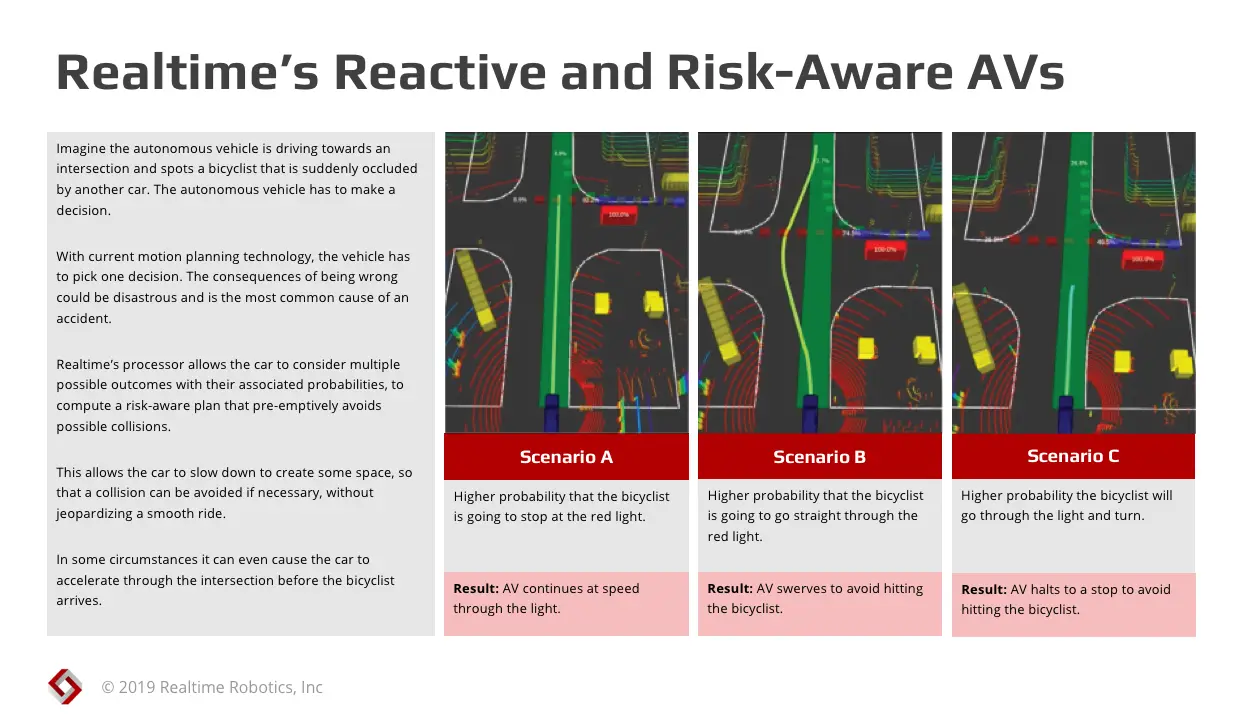
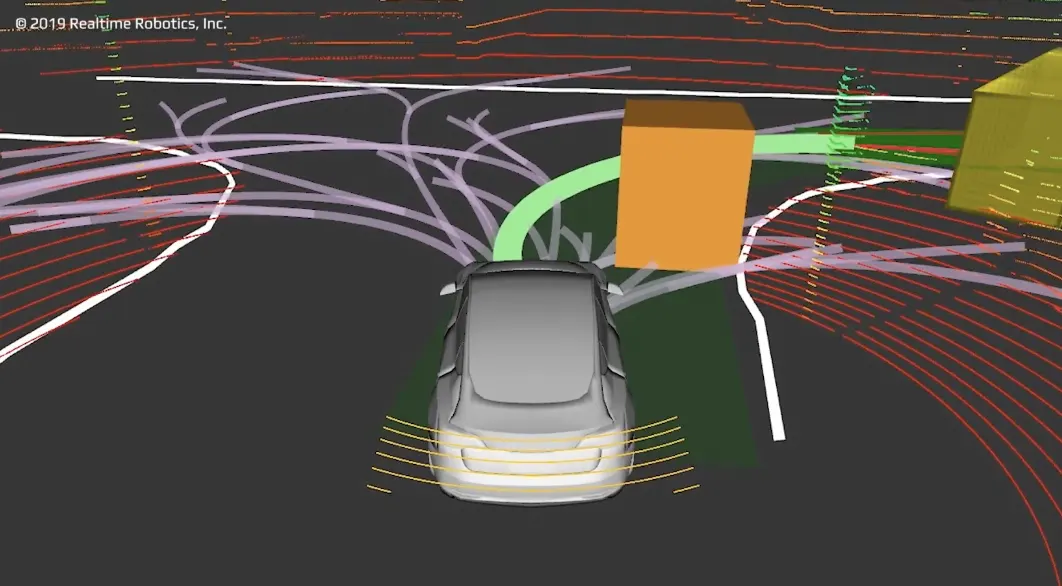
Risk-aware motion planning considers multiple possible behaviors of the non-deterministic agents in the environment and determines a motion plan that minimizes risk given these uncertain behaviors. Consider a reaction time goal of 10msec. Our motion planner can compute multiple motion plans in that time, and each of those plans can consider different possible behaviors of the other agents. Faster planning enables more plans to be computed per reaction time epoch, thus increasing the range of possible behaviors considered. This risk-aware planning is analogous to how humans drive. When, for example, we see a bicyclist on our right, we drive far enough away from her to accommodate the risk of her veering to her left, and we subconsciously compute this risk based on a mental model of bicyclist behavior that is informed by prior experiences.
If autonomous vehicles are to fulfill their promise of relieving the tedium of driving and drastically improve the safety of our roads, they will need to be able to deal with the complexity of decision-making in the real world. Realtime’s specialized motion planning processor offers a path to defeating the key remaining obstacle to achieving this vision, leading to autonomous vehicles that react instantly, and that can deal with the uncertainty inherent in complex driving scenarios like the busy urban and suburban streets that you and I navigate every day.