Insights
RapidPlan in 60 Seconds
In a minute, see how Realtime Robotics RapidPlan motion planning and collision avoidance software is primed to change the manufacturing and logistics industries.
With RapidPlan, the programming, deployment and control of industrial robots is automated, autonomously generating and choreographing all robot movements. Users create a digital twin simulation of their workcell and then simply point and click on robots and target points to create and visualize collision-free task plans. You save days to weeks of programming time per project and remove the majority of manual adjustments typical with industrial robotics.
A video walkthrough of RapidPlan in use is available below. I’ve laid out a description of the steps, to use as a guide as you view:
- We’ll start with an empty project. Then, we’ll add in CAD data to populate the cell. Multiple file types are supported, but you’ll want to add in everything you need for your model, other than the robots. Such as the table in our example.
- Next, we insert the kinematics robot model to the simulation. Most robot brands are supported and available in the library. Simply select the correct type and position it where it needs to be.
- After adding your robot model, you want to import and attach end-of-arm tooling (EOAT). Tool center points (TCPs) can also be lined up at this time. Just point and click and everything appears where you want it to be.
- The next stage is adding real-world constraints and ensuring that robots are in the right place. You have the option of jogging the robots with a teach pendant or entering exact coordinates into our software.
- Next up in our cell design is to lay out the target locations for the robot movements. Easily click to assign the targets for each robot. You can see how the robots would move between targets in the real world. As you move to the roadmap mode you can see everything you need laid out in the cell.
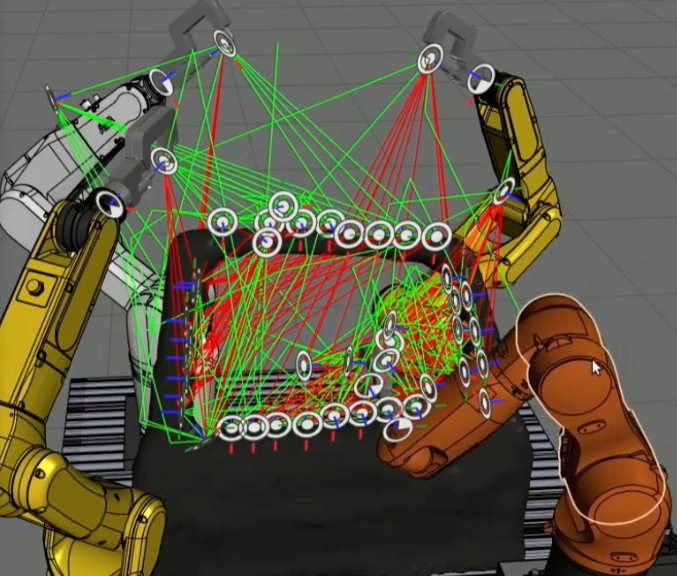
- In roadmap mode, the RapidPlan software instantly creates collision-free robot movement paths, saving programmers days to weeks of manual programming and testing time. RapidPlan calculates the correct routes for the robot movement, allowing each to move to the desired targets and conduct their tasks without collision.
- The software lets users visualize the robot paths and space reservations, simulating the results of each’s movements. All of the motions are being commanded by RapidPlan, and you can see each robot’s simulated movement, one after the other. When you are ready, you can export the motion plan.
- In the deployment phase, the robot movement is optimized and collisions are avoided by RapidPlan software. In fact, the software will immediately alert the user if any attempts were made to adjust the robot movement path in a way that a collision would occur. It prevents human error from causing a collision.
And that’s it – with these easy steps, Realtime Robotics’ RapidPlan software has made it simple and efficient to automate your automation.
To learn more about Realtime Robotics RapidPlan software, visit this page.