Tech updates
People and Robots, Working Together At Last
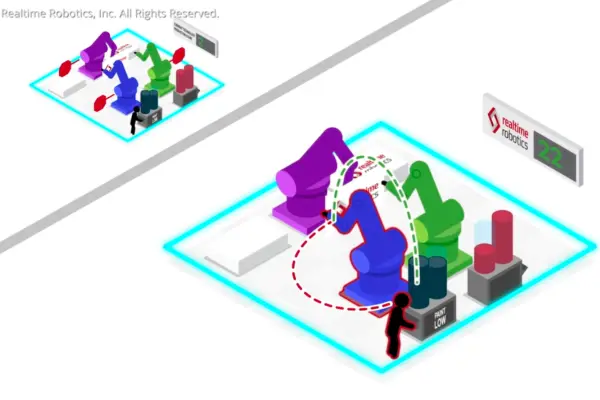
Today’s robot workspaces are designed to detect worker entrances—perhaps with a fence or a sensor—and which instructs all of the robots to idle. Why? Because today’s robots don’t perceive and react quickly enough at typical speeds to operate safely within close proximity to people. Having a fence or sensor that pauses the robot is the safest option.
Realtime Robotics has developed the Realtime Controller and RapidPlan which provide ultra-fast reaction time for robots. The core of the solution is real-time motion planning, which can quickly determine if a planned robot motion might cause a collision and immediately plan a different, non-colliding motion to get to the robot’s desired goal. Realtime’s technology empowers robots to react so quickly that they can easily continue to move—and be productive—in the presence of people.
There is no longer any reason for a workspace to sit idle while a person performs maintenance; the robots can just work around the person. In fact, truly collaborative robots or “cobots” are now possible, where people are actually expected to be in the workspace performing tasks alongside the robots.
To learn more about if Realtime’s solution is good for you, please contact us.