The future of driving is automated. The certainty of this future—despite well-publicized delays and technical challenges—derives from the numerous and substantial benefits of autonomous vehicles (AVs). The potential safety benefits are extraordinary. At least 31% of road deaths happen in DUI crashes, and an additional 10% occur when the driver is either distracted or drowsy; up to 90% of all accidents are caused by driver error. An NHTSA report estimated the total societal harm from vehicle crashes at $836 billion, a number that could be significantly mitigated with autonomous vehicles. In addition to safety, AVs would provide mobility for the disabled, elderly, and children who cannot drive themselves. And, perhaps most practically, AVs would free most of us up from having to drive ourselves when commuting to and from work.
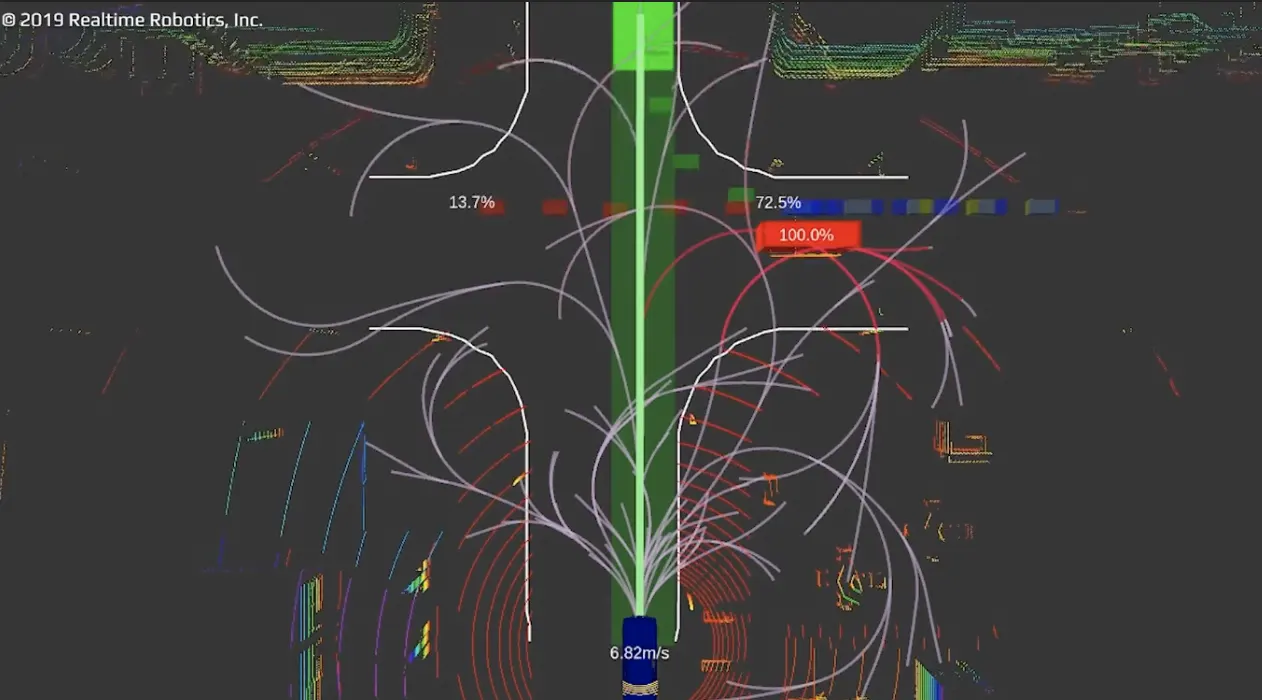
Given all of the benefits of AVs and the hype about them, why are they not here already? Yes, there are promotional videos in which AVs glide down the freeway. Yes, pilot programs exist in which a small number of AVs operate in a constrained area and only under optimal conditions (e.g., good lighting, good road conditions). Yes, many new vehicles come equipped with more autonomy than the simple cruise control of previous decades. And yes, many of us have seen videos of AVs poking along hesitantly in urban environments. Nevertheless, none of us are routinely lounging in an AV that is driving naturally—at normal speeds and without being confounded by four-way stops and pedestrians—through a city.
The potential market is enormous with the latest data predicting that AVs will be the fastest-growing automotive sector with sales crossing more than 11 million units by 2033 with a compound annual growth rate of 76.09 percent to 2033. Allied Market Research estimates that the AV market will reach $54 billion by the end of 2019 and then will explode to $556 billion by 2026. The anticipated growth is reflected in the flurry of M&A activity in the sector as automakers, suppliers and technology players in the space to continue vertical integration and consolidation.
However, before fully autonomous vehicles can become commonplace in urban environments, there are still safety challenges that need to be overcome. Solving this issue is the key to making autonomous driving and vehicles a reality. In our next blog, we will dive into autonomous driving and how we’re overcoming the critical technical challenge.
You can also read more about our philosophy in this recent IEEE article.