

Optimal fast, collision-free paths and interlocks pre-planned in the cloud for your workcells.

Have Realtime help your system perform in a changing environment.
“RTR’s AI optimization technology improved our production cycle time where traditional programming struggled.”
“With more than 120,000 weld points and 4 robots in a single application, RTR was our only option.”
“RTR’s motion planning and optimization tools are exactly what we need to work more efficiently and be more competitive.”
“RTR’s RapidPlan afforded us the flexibility to quickly program a 3-robot application, processing 12 different product SKUs.”
Resolver: Your Motion Planning Expert in the Cloud
Have an infinitely scalable motion planning expert available to you at the press of a button. Harness the power of cloud computing to solve problems in parallel with Industrial AI.
Like the revolution in computer vision or writing, you can now supercharge your motion planners to get more done with their limited time.

Resolver: Never Before Seen Speed courtesy of Industrial AI
Your team won’t just work faster—Resolver delivers results beyond what humans can achieve.
In many workcells, the solution space has 27 zeroes. Exploring it fully would take a modern computer a million years.
Resolvers industrial AI finds competitive paths in minutes and keeps improving—closing in on the global optimum while humans are still sketching.
RapidPlan: From Idea to Action in Days, Not Months
With Realtime’s software, you can move from concept to working automation at shocking speed. By combining RapidPlan with a state-of-the-art vision library, tasks like picking and placing boxes become effortless.
Save money
Dramatically reduce required simulation, OLP and even design hours.

Save lead time
Deploy faster and cut production lead times by 50%.
Get better results
Hit production targets in a fraction of the time, every time.
Get better business
Beat out the competition and deliver on every promise.

Realtime RoboticsがiREX 2025にてResolverを日本市場デビュ
iREX RTRブース (W4-61) でResolverの体験型デモを展示 BOSTON & TOKYO–(ビジネスワイヤ) — iREX 2025 — 産業用ロボットの自動動作計画、リアルタイム制御、最適化のトップランナーであるRealtime Roboticsは本日、iREX 2025でのResolver日本市場デビューをアナウンスしました。Resolverは同社のクラウドベースソリューションで、ロボットセルの設計、動作プログラミングとコミッショニング作業を効率化します。それにより、新製品・新機種の市場リリースサイクル(Time-to-market)を高速化し、ニーズ適合リスクやコスト負担を大幅に削減します。 それに加え、Resolverの新機能を初公開します。これによりエンドユーザーの業務フローがさらに効率化され、サポートするロボットモデル数も大きく拡大されます。Realtime RoboticsはブースW4-61にて、SIEMENS社...
Read More
Manufacturing Day 2025: Shaping the Future Through Innovation
Manufacturing is the backbone of modern society; it powers everything from the cars we drive...
Read More
Automatica 2025: Accelerating Robotic Automation
We wrapped up an exciting week at Automatica 2025 in Munich, where the global robotics...
Read More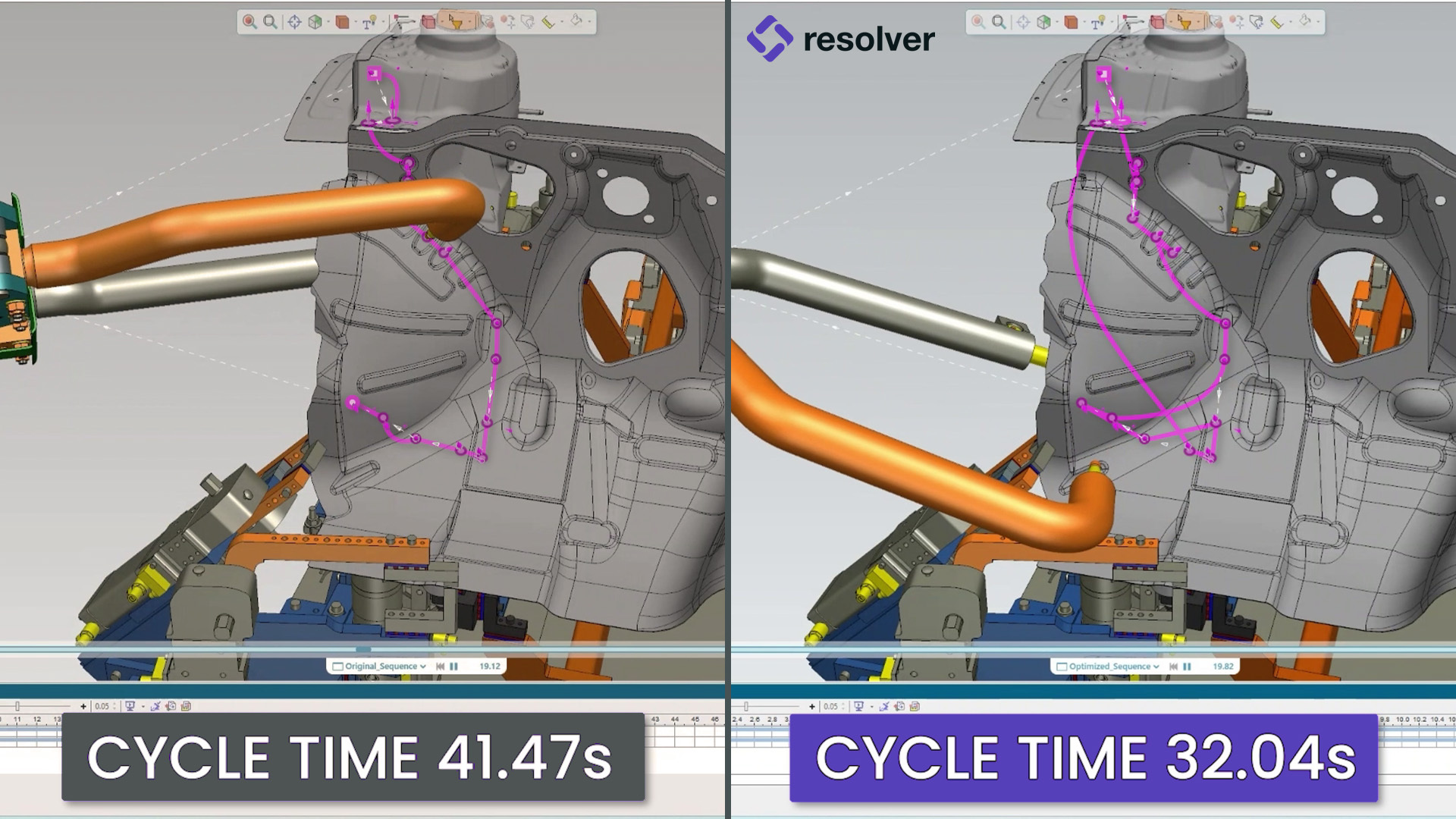
Bringing Resolver to Even More Users: Announcing New Integrations with Visual Components and MELSOFT Gemini
We’re excited to share some big news at Automatica 2025 this week: we’ve launched two...
Read More
Thanks for Helping Us Close Out a Successful Robotics Tech Week!
Last Thursday we had the pleasure of closing out a successful Robotics Tech Week 2025...
Read More
Why We Built Resolver…and Why Now Is the Right Time
If you’ve ever been involved in setting up a robotic workcell, you know the pain...
Read More