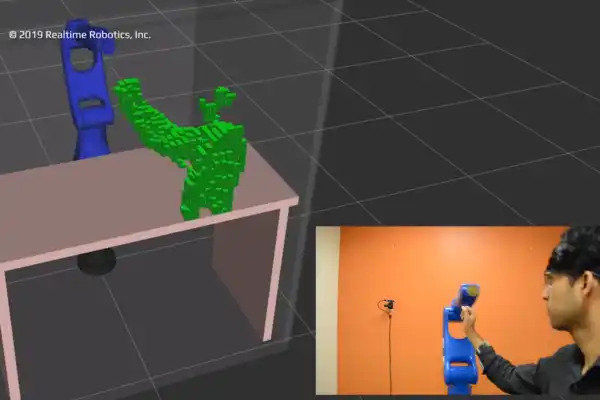

Realtime Robotics’ technology allows this Yaskawa Motoman GP7 to operate at full speed while autonomously avoiding unexpected obstacles that enter its workspace. Traditionally, a robot moving at these speeds would only be operated behind a cage in order to ensure safety. Realtime Robotics provides Motion Planning and Spatial Perception solutions that will, when safety certified, enable this Yaskawa Motoman to be fully autonomous and work collaboratively.
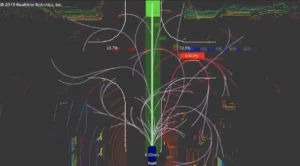
Realtime’s RapidPlan technology makes use of hardware and software to create collision-free motion plans for the robot in real-time. Users define the workcell and specify target locations for the robot to travel to within the RapidPlan toolkit. Then the RapidPlan toolkit will precompute and return all possible paths the robot can take without collisions, and the RapidPlan controller will execute these paths driving robots such as the Motoman GP7 to the desired location. When combined with Realtime’s RapidSense technology, the robot can react and replan a subsequent collision-free path based on obstacles and task variations in real-time.
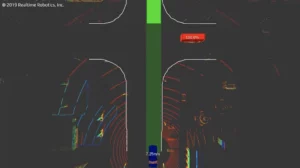
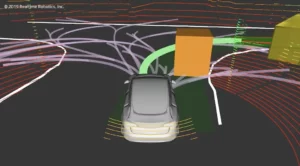
Realtimes’ RapidSense technology uses depth cameras to continuously scan the environment and create a real-time map for the robot to navigate. The green region you see in the video is the resulting map of unknown obstacles. This map is used by RapidPlan to find paths around the table, robot stand, and any unknown obstacles detected by RapidSense.
In industrial settings where processes change rapidly and safety is a paramount, Realtime Robotics’ technology is there to make your life easier. Rather than spending time programming discrete motions you want your robot to take, you can spend more time developing new applications. Current applications can be retrofitted within a few hours and there is repeatability across all deployments. Realtime Robotics manages your motion planning and spatial perception so you can unleash the full potential of your automation.
Get in touch for more information on our technology and how it can enhance your application.