
Our last blog outlined why autonomous vehicles are not a passing fad and are the future of transportation. However to realize their full potential motion planning is an essential component that will address a myriad of safety challenges. Before we dive into motion planning let’s look at autonomous driving in more detail.
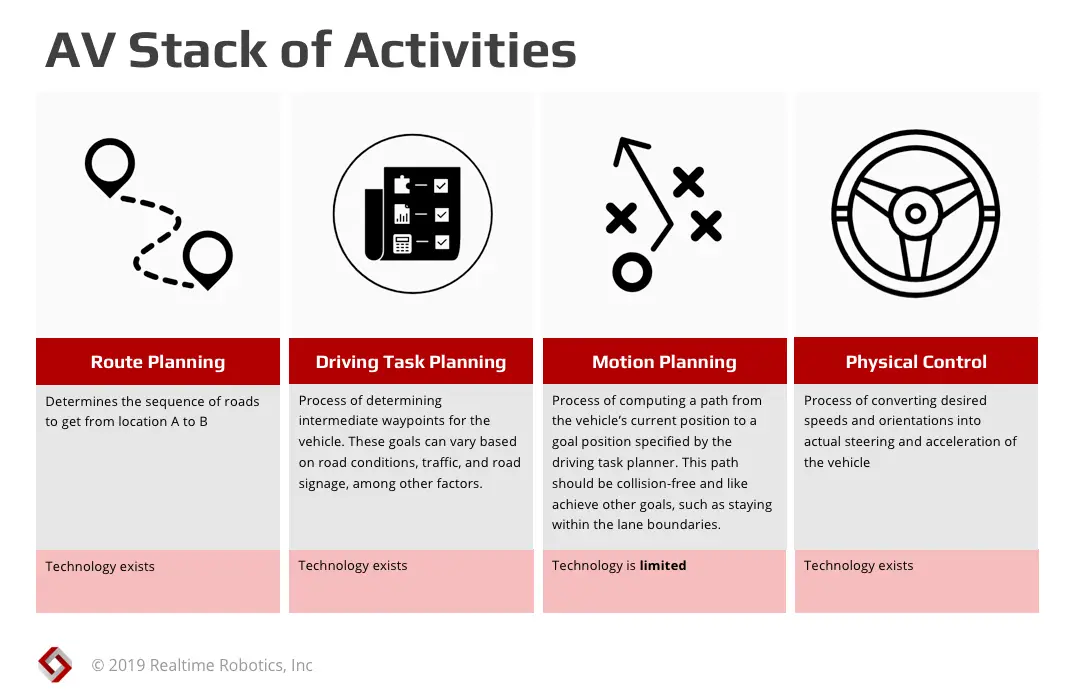
There are many aspects to autonomous driving, all of which need to perform well. You can think of autonomous driving as a four-level stack of activities, in the following top-down order: route planning, behavior planning, motion planning, and physical control.
-
Route Planning determines the sequence of roads to get from location A to B.
-
Behavior Planning is the process of determining specific, concrete waypoints along the planned route. These goals can vary based on road conditions, traffic, and road signage, among other factors.
-
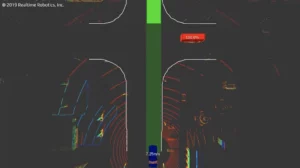
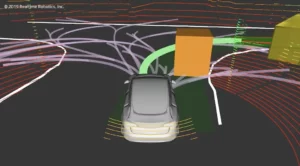
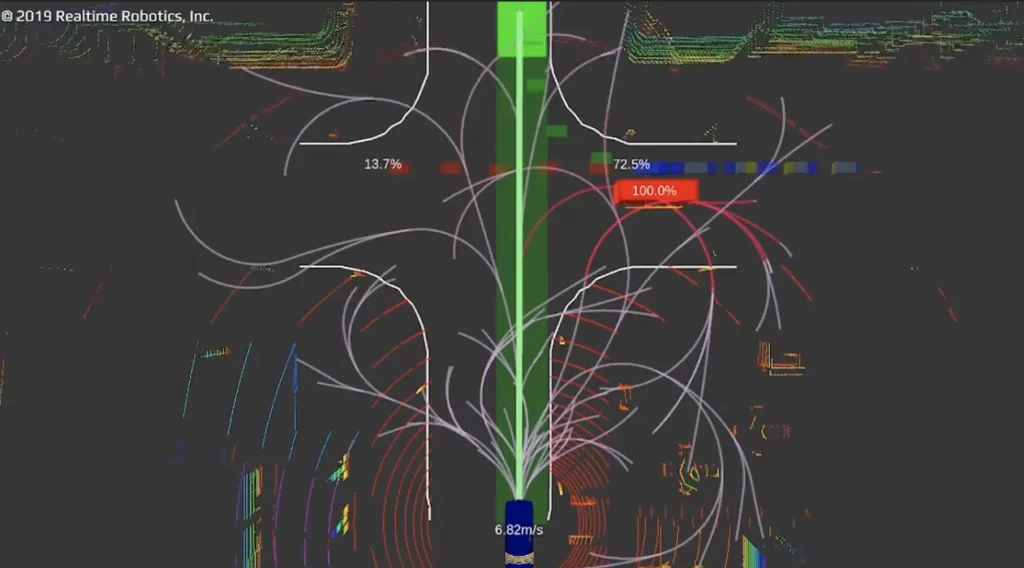
Motion Planning computes a path from the vehicle’s current position to a waypoint specified by the driving task planner. This path should be collision-free and likely achieve other goals, such as staying within the lane boundaries.
-
Physical Control is the process of converting desired speeds and orientations into actual steering and acceleration of the vehicle.
All four levels rely on accurate perception and this is where the majority of solutions continue to emerge. However, control of the car ultimately boils down to these four control levels, and of these, motion planning is the current technical bottleneck and is the primary obstacle to the adoption of AVs.
The current state-of-the-art for motion planning leverages high-performance commodity GPUs. Yet even with a “500-watt supercomputer in the trunk,” as one of our customers recently described it to us, they could compute only three plans per second. Even given high-performance GPUs, motion planning is too computationally difficult for commodity processors to achieve the required performance.
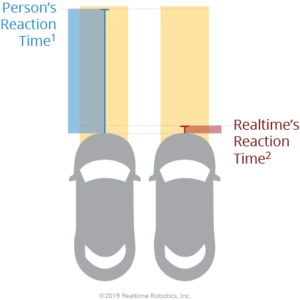
What is the required motion planning performance? At an absolute minimum, the motion planner must be able to react—that is, create a new motion plan—as fast as an alert human driver. That reaction time is on the order of 250msec, and one can imagine current technology evolving to reach that planning speed, albeit at an exorbitant power budget. But we would like to achieve far more than this bare minimum; one of the attractive features of autonomous vehicles is the potential to achieve far greater safety than that achievable by a human driver. Significantly faster motion planning would translate to much faster reaction times. The difference between reaction times of 250msec1 and 5msec2, for a vehicle traveling at 40mph, is the difference between 15 feet and 0.3 feet traveled before reacting.
Motion planning speed is clearly beneficial for safety, but it offers other important benefits. When motion planning is slow, an AV cannot react quickly to dynamic, non-deterministic agents in its environment, including pedestrians, bicyclists, and other vehicles. When you can’t react quickly, you must move more slowly and more cautiously. Videos of AVs driving in urban environments reveal that they drive slowly and haltingly, having to compensate for their inability to rapidly re-plan. While such hesitant driving is frustrating to the passenger, it is also likely to aggravate other drivers who are stuck behind the autonomous vehicle or waiting for it to navigate a four-way stop. Aggravating the driving public is dangerous for business, particularly if the driving public clamors for legislation to restrict current hesitant-based driving AVs.
The need for motion planning is clear and our final blog in this series explains how we are making this possible.
¹250ms is the average human reaction time to the visual stimulus, https://www.ncbi.nlm.nih.gov/pmc/articles/PMC4456887/
²Realtime Robotic’s AV motion planner can plan in 1ms, an additional 4 ms is taken to receive and process sensor data.